
09-C28-Phillips
Clases Prev Mm >> > 9a - Clase
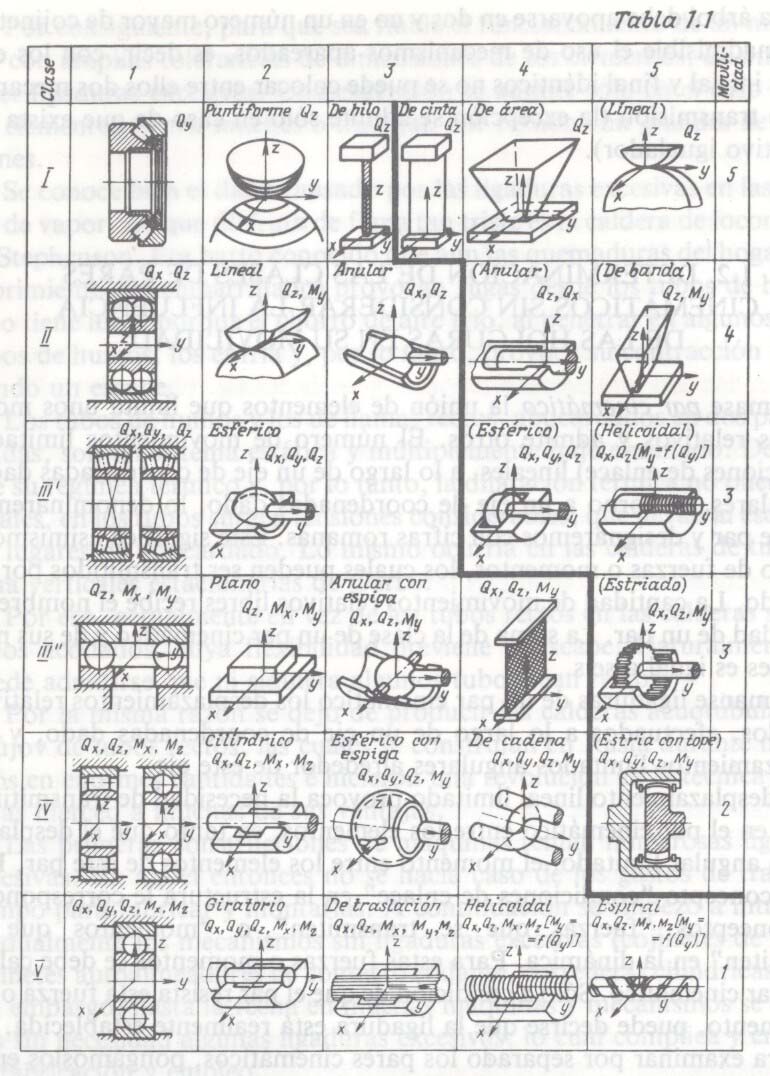
PLANTEAMIENTO DE PHILLIPS – CONECTIVIDAD DE PARES CINEMATICOS NO HABITUALES
Para completar el criterio de movilidad para el cálculo de los grados de libertad de mecanismos espaciales, en esta sección se presenta el PLANTEAMIENTO DE PHILLIPS, que se basa en consideraciones de otro tipo que las presentadas para identificar los grados de libertad que tiene cada par, es decir su CONECTIVIDAD, y que permite su aplicación a cualquier tipo de dispositivo que se pueda considerar. Es un planteamiento curioso, que partiendo de la base que estamos considerando cuerpos rígidos y pares ideales, identifica el número de grados de libertad de un par determinado restando de seis el número de zonas de contacto o de desgaste reales que existirían entre los elementos de un par del mismo tipo real (no ideal). Por ejemplo, en un par cilíndrico, considera que en entre los elementos del par existirían cuatro zonas de desgaste, con lo que su número de grados de libertad es dos (seis menos cuatro). Con este planteamiento, es posible determinar los grados de libertad existentes en pares distintos de los seis ordinarios comentados. Esta sección está pensada para ser explicada en base a muchos ejemplos tomados del libro “Introducing Screw Theory. Volume I”, cuyo autor es J. Phillips.
PARES CINEMATICOS CON UNO Y DOS GRADOS DE LIBERAD – MAUREL
Resulta interesante visualizar el video que se proporciona, en el que se puede observar cómo cambian los grados de libertad del PAR CINEMATICO entre dos cuerpos, simplemente cambiando la forma de uno de los cuerpos. Este video es del canal de YouTube de Jacques Maurel, que seguiremos utilizando en clases posteriores cuando hablemos de los mecanismos que se pueden utilizar en una sierra de calar.
APLICACIÓN PLANTEAMIENTO PHILLIPS – AUTO-ALINEADO MECANISMO PUERTA CONVENCIONAL
En esta sección llevaremos a cabo una aplicación del Planteamiento de Phillips para determinar la CONECTIVAD de varios PARES CINEMATICOS no habituales, o al menos no desde un punto de vista industrial. Luego calcularemos la MOVILIDAD de algún mecanismo cotidiano, considerado como conjunto de cuerpos interconectados mediante ese tipo de pares no habituales industrialmente. Para finalizar con el AUTO-ALINEADO del mecanismo de una PUERTA CONVENCIONAL, determinando que tipo de pares cinemáticos tendríamos que poner en lugar de los giratorios que representan las bisagras. Tanto para el caso que la puerta tenga DOS BISAGRAS, como para cuanto tiene TRES BISAGRAS.
Clase - v2024 - Documentos XLSX
Documentos a DESCARGAR para completar, personalizar y subir a la cuenta de entrega común. La forma de subir al servidor cada uno de los documentos completados consiste en abrir una conexión en una ventana del explorador de Windows, copiando el siguiente comando: FTP-09a. De esa forma se tendrá abierta una ventana en la cuenta de entrega, donde se podrá subir el documento denominado con el formato habitual, arrastrándolo desde otra ventana en Windows. Donde “alumno” habrá que sustituirlo por tu identificativo de la UPV, que forma parte de tu dirección de correo electrónico: alumno@escuela.upv.es. Una vez lo hayas subido, no podrás descargarlo ni borrarlo, ni cambiarle el nombre.