05-P1 - m4-a2a
Clases Prev Mm >> > 5a - Clase
La actividad completa se corresponde con el PROYECTO 1. La PRIMERA PARTE de esta actividad (m4-a2a-Modelo Mechanica), FASES de la PRIMERA la QUINTA, constituye la 1ª PRACTICA a realizar FUERA DE CLASE, y las TRES FASES RESTANTES (m4-a2a-Modelo Mathematica), de la SEXTA a la OCTAVA, completan la actividad. Al tratarse como un Proyecto, se considera que son necesarias dos semanas para poderla completar.
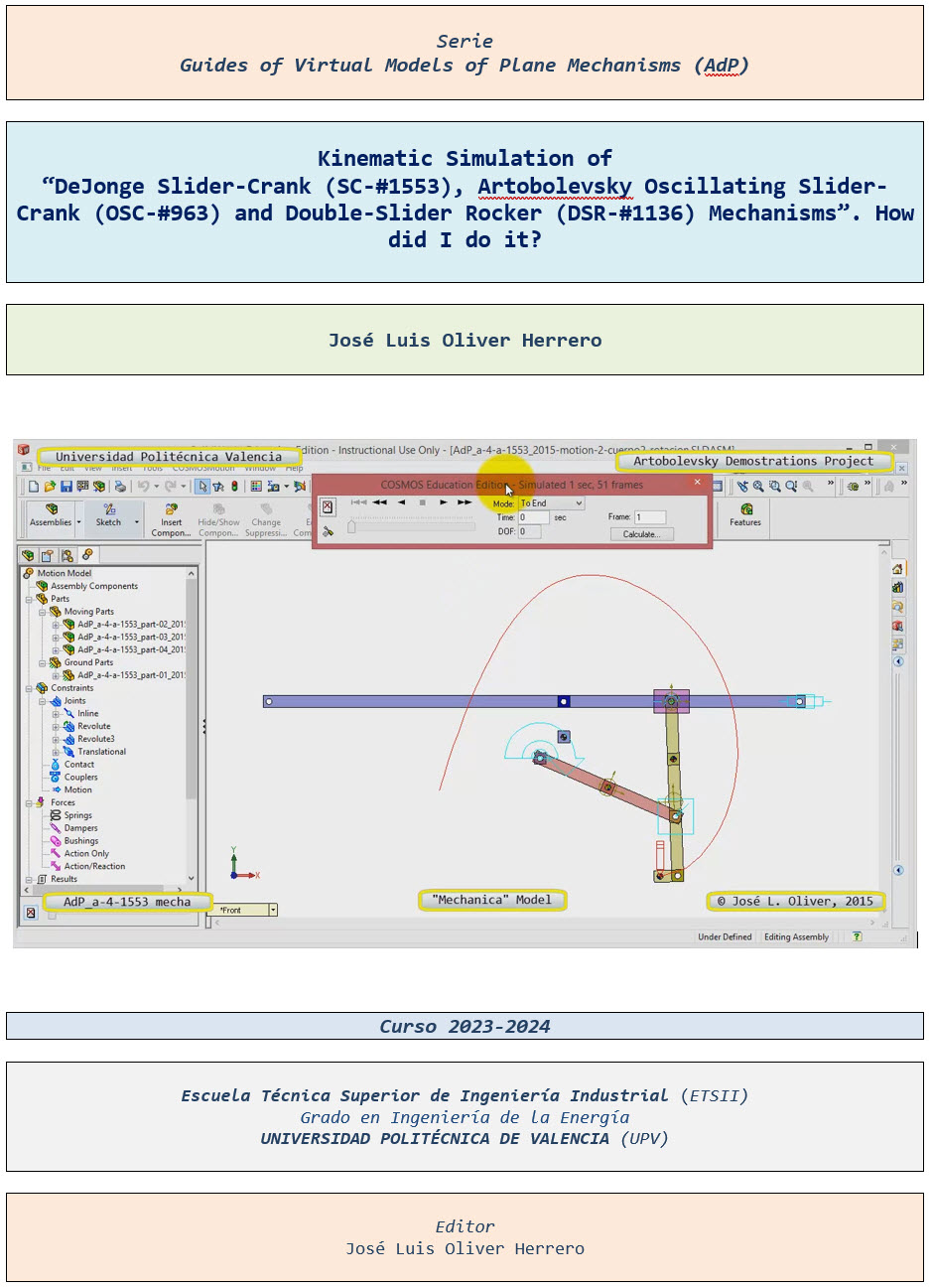
No hay un documento actualizado sobre esta actividad. El existente en el material común corresponde a la versión de hace varios cursos, que hemos modificado sustancialmente, de tal manera que lo que en su momento se realizó utilizando “cuadriláteros articulados”, ahora lo realizamos utilizando un “triangulo de lado variable”. La PRIMERA PARTE de la actividad (m4-a2a-Modelo Mechanica), FASES de la PRIMERA la QUINTA, constituye la 1ª PRACTICA a realizar FUERA DE CLASE, consiste en comenzar el proceso de creación de un modelo cinemático del mecanismo de cuatro cuerpos “AdP_a-4-1553” con el programa “Mechanica”, que es una aplicación del programa Mathematica, y utilizarlo para comprobar la curva trazada por un punto del acoplador. Curva que fue obtenida en la actividad m3-a2a con el programa Cosmos Motion 2007. Al final hay que comparar las curvas tanto con “Mechanica” como con Mathematica. El proceso se divide en varias fases, habiendo para cada una de ellas un documento mp4 en el material de referencia. Durante esta primera semana únicamente habrá que realizar las cinco primeras fases. La PRIMERA FASE, documento “m4-a1a_a-4-1553_1-presentacion_2015.mp4” es una revisión del proceso seguido en la actividad previa para crear el modelo cinematico del mecanismo cuadrilátero articulado “AdP_a-c-0658” con el programa “Mechanica”. Este documento MP4 coincide con los dos primeros tramos de 10 minutos que podrás encontrar en el siguiente enlace de “UPV [Media]”: 2015-27 - Simulación Mecanismo a-4-1153 con Mechanica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-27 - Simulación Mecanismo a-4-1153 con Mechanica”. En la SEGUNDA FASE, documento “m4-a1a_a-4-1553_2-dimensionado_2015.mp4”, se procede a revisar el modelo virtual creado en Solidworks 2007 para el mecanismo objeto de estudio, “AdP_a-4-1553”, redimensionando adecuadamente las longitudes de sus piezas para que cumpla las especificaciones de Artobolevsky y nuestras propias especificaciones, con el objeto de poder demostrar el funcionamiento de mecanismo utilizando sus dos impulsores. Se corresponde con los tramos de 10 minutos del 3 al 5 que podrás encontrar en el enlace previo. En la TERCERA FASE, documento “m4-a1a_a-4-1553_3-parametrizacion_2015.mp4”, se muestra como parametrizar cada pieza, como crear las imágenes necesarias que definen la posición inicial de cada una de ellas, y como preparar la información sobre las curvas generadas por el punto del acoplador considerando ambos impulsores, con el fin que podamos leerla con Mathematica. Se corresponde con los tramos de 10 minutos del 6 al 11 que podrás encontrar en el enlace previo. Des estas primeras tres fases del proceso, estoy elaborando una “Lesson” en Poliformat que podrás encontrar en el siguiente enlace: #M027-m4-a2a-p1a. En la CUARTA FASE, documento “m4-a1a_a-4-1553_4-modelo gráfico sw_2015.mp4”, se muestra como obtener en Mathematica un modelo grafico del mecanismo en la posición inicial para ambos impulsores, utilizando la información generada en la fase previa. Se corresponde con los tramos de 10 minutos del 12 al 19 que podrás encontrar en el enlace previo. En la QUINTA FASE, documento “m4-a1a_a-4-1553_5-modelo mechanica_2015.mp4”, se crea un modelo cinematico en “Mechanica” para cada impulsor, definiendo las piezas por puntos, definiendo los pares cinematicos utilizando las restricciones disponibles en esa aplicación, y se utilizan los modelos creados para comprobar las trayectorias del punto del acoplador para ambos impulsores, comparándolas con las obtenidas en Cosmos Motion 2007. Se corresponde con los tramos de 10 minutos del 20 al 25 que podrás encontrar en el enlace previo. De estas cuarta y quinta fases del proceso estoy elaborando una “Lesson” en Poliformat que podrás encontrar en el siguiente enlace: #M028-m4-a2a-p2a.
Como PRUEBA DE ASISTENCIA a la PRACTICA, tendrás que realizar EN CLASE, durante el tiempo de duración de la sesión a la que acudas, la actividad m5-p1a, cuya información te facilitaré en un e-mail aparte.
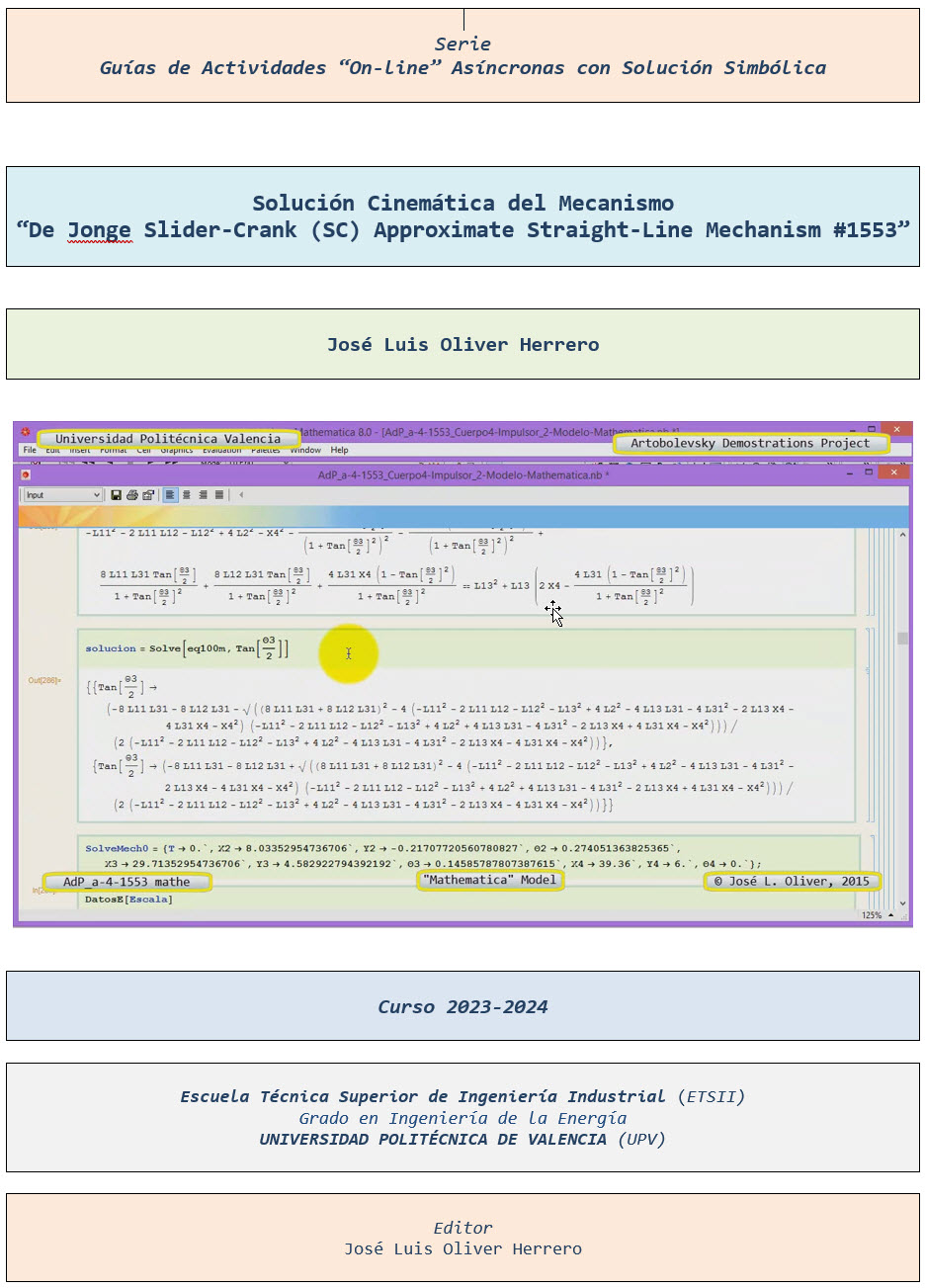
Las siguientes fases de la actividad (m4-a2a-Modelo Mathematica) habrá que realizarlas durante SEMANA SIGUIENTE a la que realices la práctica. En la SEXTA FASE, documento “m4-a2a_a-4-1553_6a-modelo mathematica_2015.mp4”, se crea el modelo en Mathematica del mecanismo para cada impulsor, suprimiendo la asignación de valores numéricos a los parámetros, utilizando las ecuaciones de restricción que utiliza el modelo en “Mechanica” creado en la fase anterior, y se procede a resolverlas obteniendo la solución simbólica de cada coordenada generalizada dependiente, en función de la coordenada independiente, que es la asociada al impulsor del mecanismo. Se utiliza el método de sustitución tal como la intuición indica que hay que utilizarlo. Con la solución simbólica obtenida se genera la curva trazada por el punto del acoplador, para cada impulsor, y se compara con la obtenida con Cosmos. Cuando revisamos los resultados obtenidos considerando la deslizadera como impulsor observamos una discrepancia en la curva que asociamos en principio a que la solución que hemos obtenido depende del cuadrante en que se encuentre el ángulo del acoplador. Este documento MP4 coincide con los tramos de 10 minutos del 1 al 13 que podrás encontrar en el siguiente enlace de “UPV [Media]”: 2015-29 - Solución Cinemática Simbólica a-4-1153 con Mathematica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-29 - Solución Cinemática Simbólica a-4-1153 con Mathematica”. De esta sexta fase del proceso estoy elaborando una “Lesson” en Poliformat que podrás encontrar en el siguiente enlace: #M034-m4-a2a-p3a. En la SEPTIMA FASE, documento “m4-a2a_a-4-1553_6b-modelo mathematica-revision_2015.mp4”, revisamos el procedimiento seguido para obtener la solución simbólica de las coordenadas generalizadas para el caso en que el impulsor es la deslizadera, con el fin de mejorar los resultados obtenidos en la fase previa. Introducimos el uso de la “tangente del ángulo medio” y de la utilización del comando “Eliminate” de Mathematica para obtener las soluciones del ángulo del acoplador y del seguidor, observando que de esta forma se obtienen dos soluciones para cada uno de ellos, que se corresponden con las dos formas de montaje del mecanismo. Comprobamos que de esta forma la comparación de las curvas de Cosmos y de Mathematica resulta satisfactoria. Se corresponde con los tramos de 10 minutos del 14 al 16 que podrás encontrar en el enlace previo. En la OCTAVA FASE y ultima, documento “m4-a2a_a-4-1553_6c-modelo mathematica-ambas_2015.mp4”, consideramos como impulsor la manivela, cuerpo 2, y siguiendo el procedimiento presentado en la fase previa procedemos a solucionar simbólicamente todas las coordenadas generalizadas independientes en función de la dependiente, distinguiendo la solución para cada forma de montaje y guardando estas soluciones en fichero se texto con el objeto de utilizarlas en la siguiente actividad, que se corresponderá con el Proyecto 2. Volvemos a comparar las curvas de Cosmos y Mathematica, pero en esta ocasión para las dos formas de montaje. Se corresponde con los tramos de 10 minutos del 17 al 23 que podrás encontrar en el enlace previo.De estas séptima y octava fases del proceso estoy elaborando una “Lesson” en Poliformat que podrás encontrar en el siguiente enlace: #M035-m4-a2a-p4a.
Todos los documentos elaborados durante la realización de esta actividad, así como los de partida, elaborados en las actividades previas a esta realizadas con el mismo modelo, habrá que subirlos a la cuenta de entrega, sin crear ninguna carpeta adicional.
IMPORTANTE
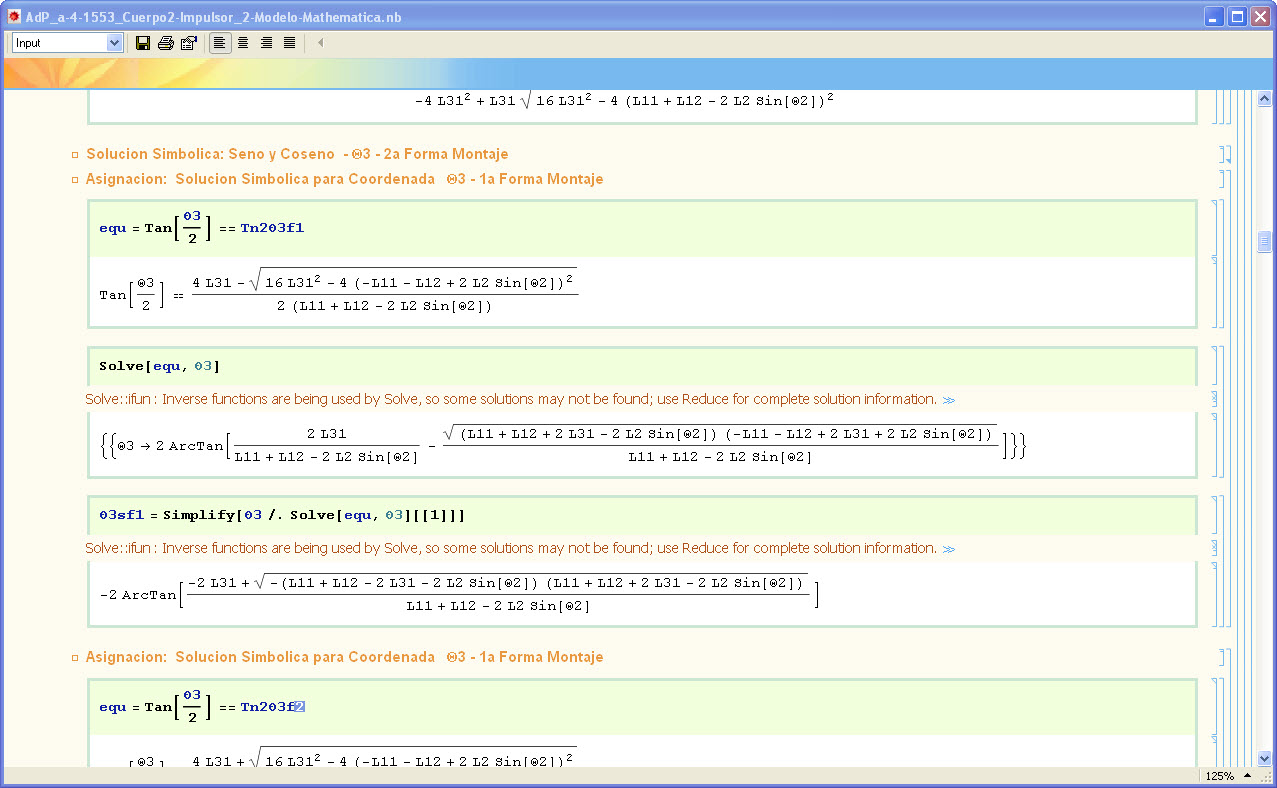
En la grabación en video de esta actividad, la m4-a2a, existe una omisión. Para que podais comprobar como lo hago, en la siguiente imagen se muestra como realizo la asignación de los valores numéricos a los ángulos.
GUIAS KINDLE DE ACTiVIDADES "ON-LINE" ASINCRONAS
La información detallada de la actividad, los enlaces necesarios para poder realizarla, y toda la información complementaria elaborada la puedes encontrar en las siguientes Guías Kindle:
Tecnología Máquinas (TM) II
Simulación - TLV
Solución S - TLV
SC - Simulation
SC - Symbolic S