10-P7a - m4-a5a
Clases Prev Mm >> > 10a Clase
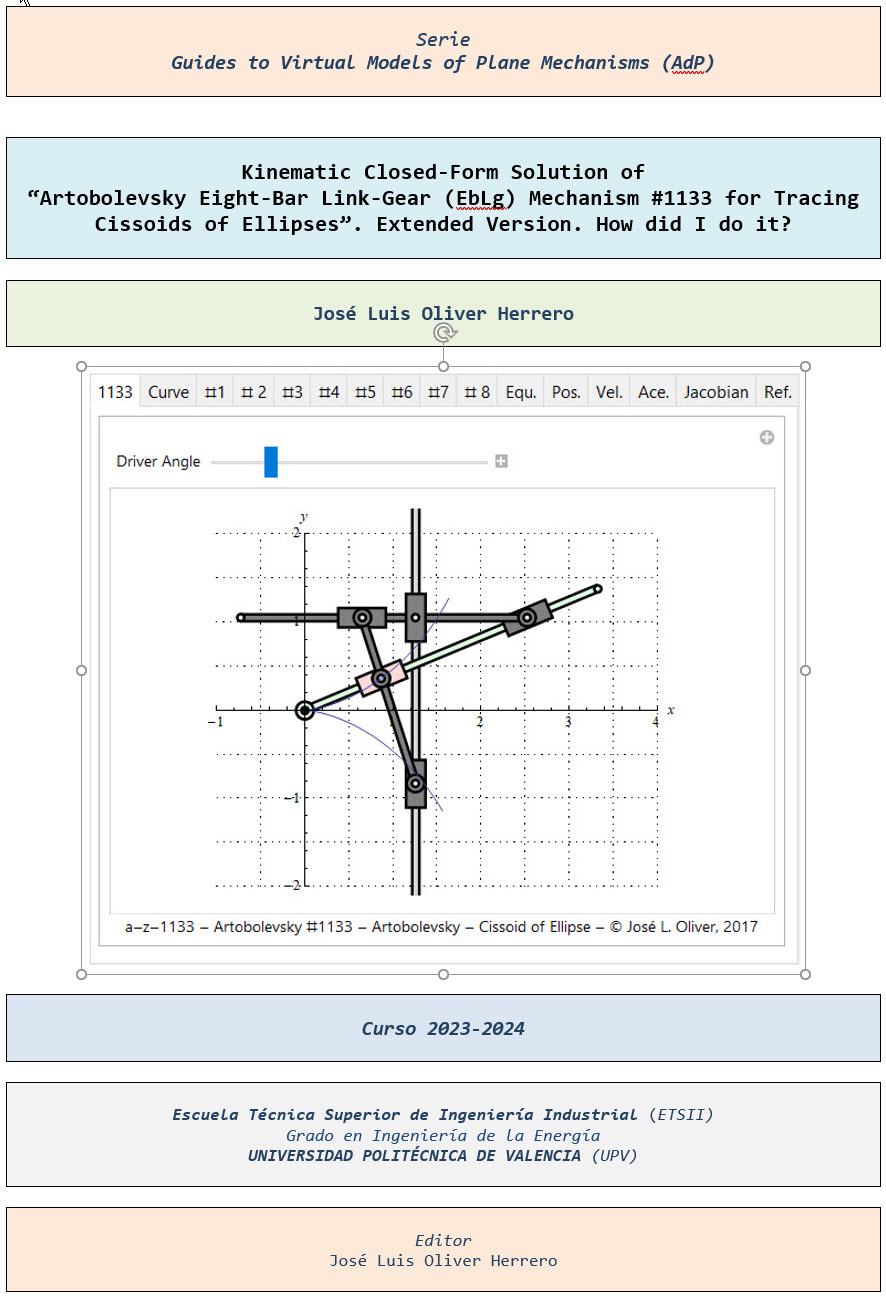
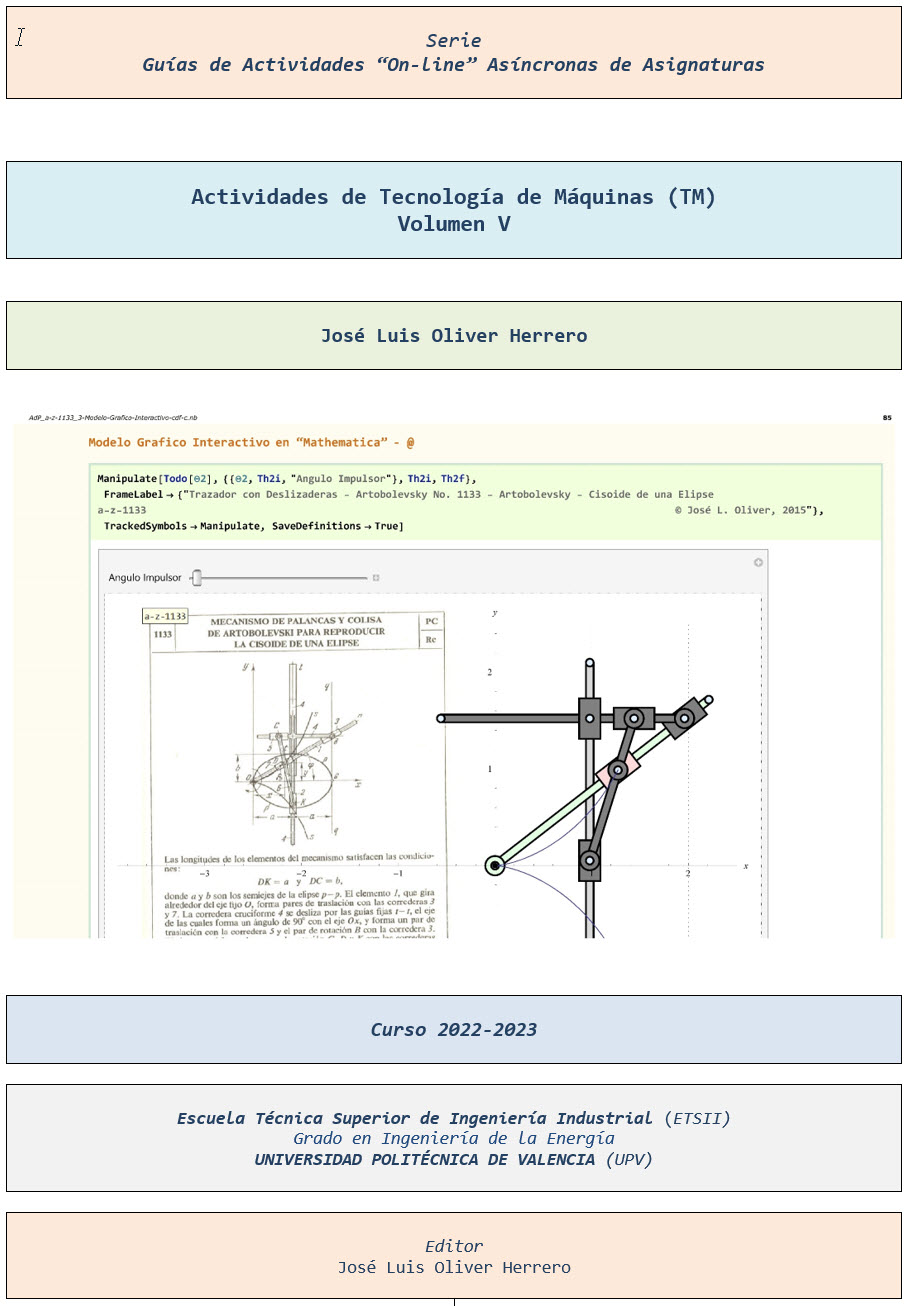
Esta actividad, la m4-a5a, constituye el 50% del PROYECTO 7 de los incluidos en el apartado “evaluación” de la “guía docente”. Actualmente estoy elaborando unas “Lessons” en Poliformat sobre esta actividad que podrás visualizar en los siguientes enlaces, si previamente te has identificado en la UPVNET: 1ª Parte: #M036-m4-a5a-p1a; y 2ª Parte: #M037-m4-a5a-p2a. La actividad completa consiste en crear un modelo cinemático del mecanismo trazador AdP_a-z-1133 con el programa “Mathematica”, suprimiendo la asignación de valores numéricos a los parámetros, utilizando las ecuaciones de restricción que utiliza el modelo en “Mechanica” creado en la actividad anterior, y procediendo a resolverlas utilizando de nuevo el método descrito en la actividad m4-a2a basado en la “tangente del ángulo medio”, obteniendo la solución simbólica de cada coordenada generalizada dependiente en función de la coordenada independiente, que es la asociada al impulsor del mecanismo.
Con la solución simbólica obtenida se he de generar la curva trazada por el punto trazador y ha de compararse con la obtenida con Cosmos. Además debe obtenerse la expresión simbólica de la ecuación matemática de la curva trazada y compararla con la existente en la descripción de Artobolevsky. Posteriormente han de obtenerse las expresiones simbólicas para las velocidades y las aceleraciones generalizadas, y las curvas de velocidad y aceleración del punto trazador, comparándolas con las que se pueden obtener con el programa Cosmos. Para poder realizar esta actividad en el material de referencia existe un documento MP4 titulado “m4-a5a_a-z-113_modelo mathematica_2015.mp4”. Este documento MP4 también se puede encontrar en tramos de 10 minutos en el siguiente enlace de “UPV [Media]”: 2015-30 - Solución Cinemática Simbólica a-z-1133 con Mathematica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-30 - Solución Cinemática Simbólica a-z-1133 con Mathematica”.
Además se proporcionan modelos resueltos en cursos anteriores, que se utilizan para seleccionar las nuevas secciones que se introducen a lo largo del proceso. Una vez terminado el proceso, el contenido previo y el creado durante esta actividad se han de subir directamente al servidor utilizando la cuenta de entrega, sin crear ninguna carpeta adicional.
GUIAS KINDLE DE ACTiVIDADES "ON-LINE" ASINCRONAS
La información detallada de la actividad, los enlaces necesarios para poder realizarla, y toda la información complementaria elaborada la puedes encontrar en las siguientes Guías Kindle:
Tecnología Máquinas (TM) V
EbLg - Symbolic S I

EbLg - Symbolic S II