
07-C24-Mov3D-T
Clases Prev Mm >> > 7a - Clase
CONFIGURACION CINEMATICA MOV3D THANG = DIAGRAMA CINEMATICO (DC3D) + MOVILIDAD (M3D)
En esta TAREA DE CLASE vamos a determinar la “Configuración Cinemática” de un MECANISMO TRIDIMENSIONAL de la colección de THANG. La determinación de la “Configuración Cinemática” consiste en dibujar el Diagrama Cinemático del mecanismo (DC3D) y comprobar la Movilidad (M) utilizando la Formula de Gruebler para mecanismos ESPACIALES. Dado que el mecanismo ha sido simulado el Recurdyn, llevando a cabo su AUTO-ALINEADO, disponemos de su configuracion cinemática. En esta actividad completaremos su DC3D y comprobaremos su M3D.
Para poder entregar esta tarea de clase con el desarrollo necesario de la actividad o actividades propuestas, poder contestar a la pregunta o preguntas que sean formuladas durante la misma, y para poder justificar la asistencia obligatoria es necesario descargarse e imprimir el siguiente documento antes de clase, llevándolo, completándolo, y entregándolo al final al profesor con tus apellidos y nombre, en este orden.
Clase - v2024 - Documentos XLSX
Documentos a DESCARGAR para completar, personalizar y subir a la cuenta de entrega común. La forma de subir al servidor cada uno de los documentos completados consiste en abrir una conexión en una ventana del explorador de Windows, copiando el siguiente comando: FTP-07a. De esa forma se tendrá abierta una ventana en la cuenta de entrega, donde se podrá subir el documento denominado con el formato habitual, arrastrándolo desde otra ventana en Windows. Donde “alumno” habrá que sustituirlo por tu identificativo de la UPV, que forma parte de tu dirección de correo electrónico: alumno@escuela.upv.es. Una vez lo hayas subido, no podrás descargarlo ni borrarlo, ni cambiarle el nombre.
1
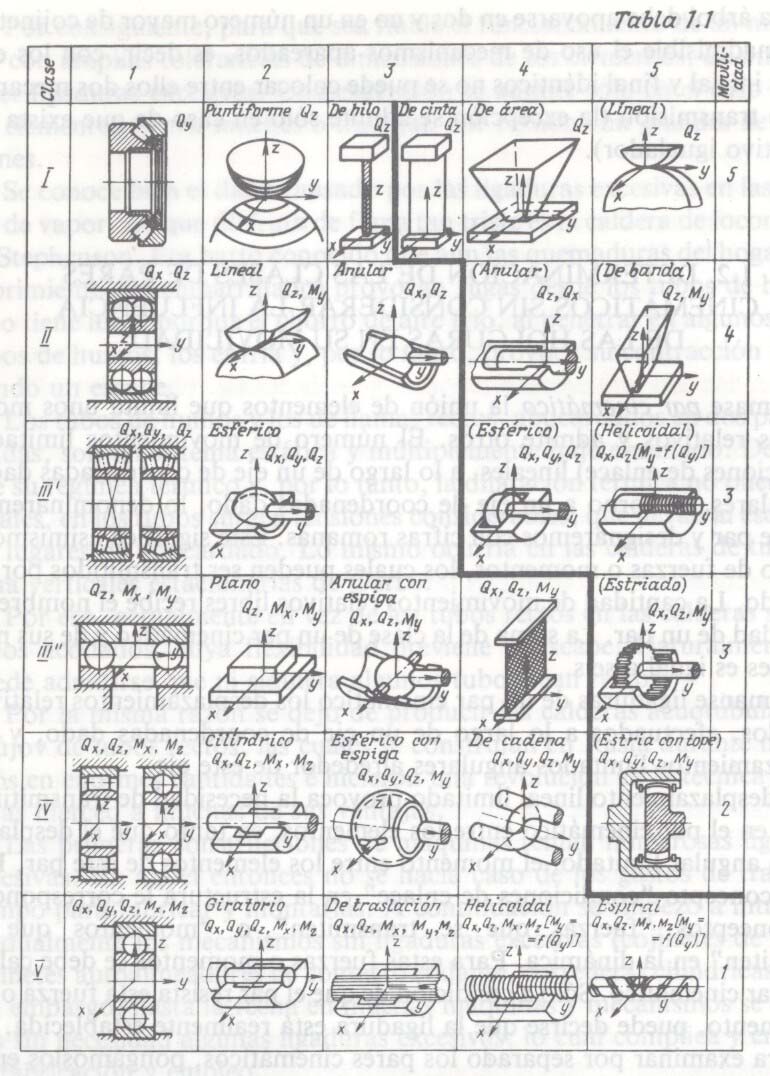
MOVILIDAD EN MECANISMOS ESPACIALES
En esta sección recordamos la versión tridimensional de la FORMULA DE MOVILIDAD DE GRUEBLER, que es la que utilizan los dos programas CAE que utilizamos en esta asignatura, el Cosmos Motion y el Recurdyn. Volvemos a facilitar la TABLA DE RESHETOV, donde se relacionan los PARES CINEMATICOS disponibles industrialmente, que son los que están disponibles en los programas de CAE comentados. Tendrás que leer con detalle el siguiente documento PDF.