04-T9 - m4-a1a
Clases Prev Mm >> > 4a - Clase
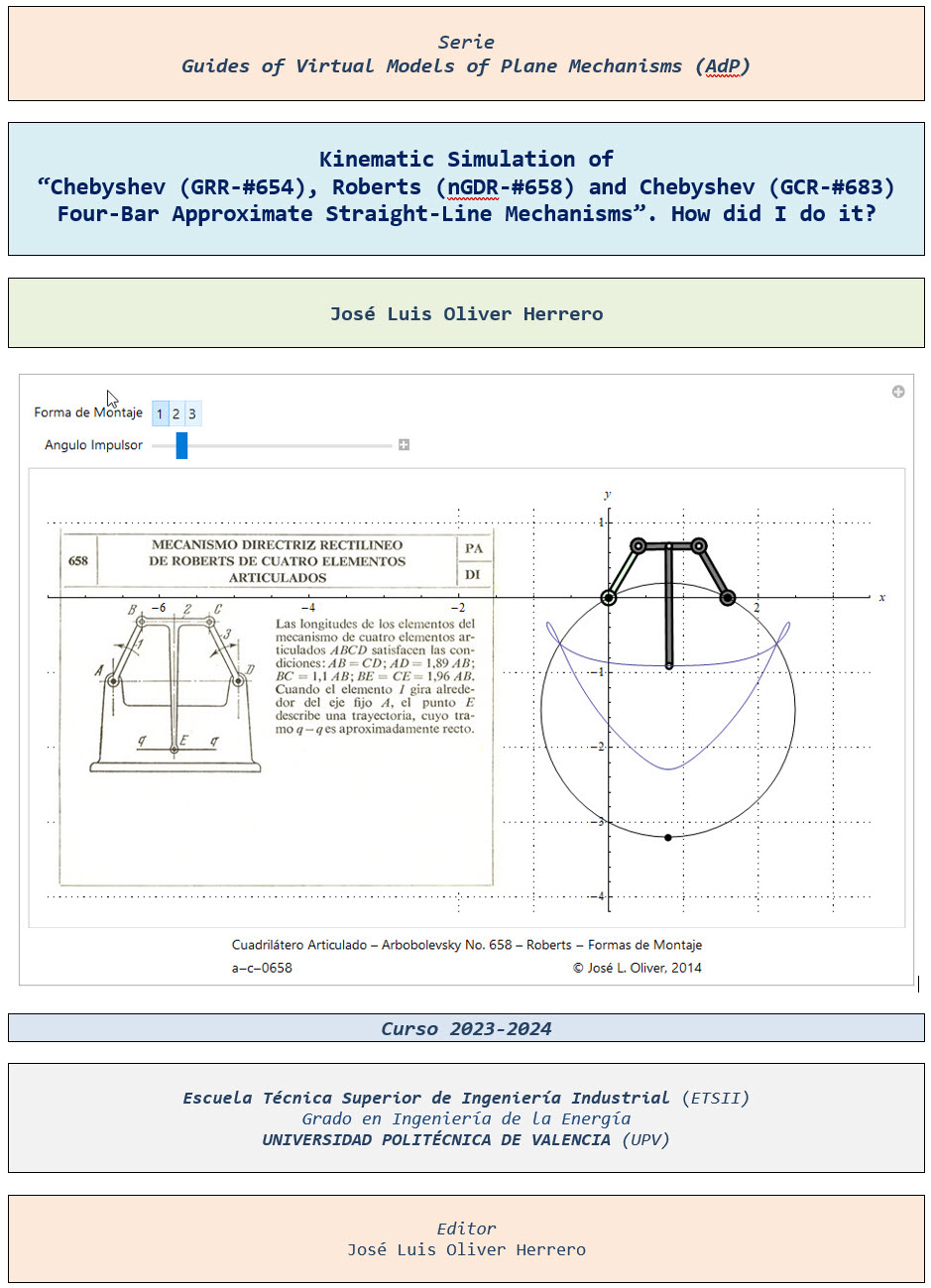
Esta actividad se corresponde con el TRABAJO 9 de la “guía docente”. La parte obligatoria de la actividad consiste en crear un modelo cinemático del mecanismo cuadrilátero articulado “AdP_a-c-0658”, tipo II de Grashof, con el programa “Mechanica”, que es una aplicación del programa Mathematica, y utilizarlo para comprobar la curva trazada por un punto del acoplador. Curva que fue obtenida en la actividad m3-a1a con el programa Cosmos Motion 2007. Al final hay que comparar ambas curvas con Mathematica.
El proceso se divide en varias FASES, habiendo para cada una de ellas un documento MP4 en el material de referencia. La PRIMERA es una presentación de esta actividad en la que se indica, en base a la información disponible aspectos como: (a) el libro de referencia en la que se basa el procedimiento que seguiremos, así como el autor del mismo y el lugar donde lo desarrollo; (b) donde encontrar información sobre el programa Mathematica; y (c) donde encontrar información sobre la aplicación “Mechanical Systems Pack”, programada en base al libro mencionado. Se indica como acceder a esa aplicación a través del servidor, y como ubicarla en la correspondiente carpeta de la instalación de Mathematica. El documento mp4 se denomina: “AdP_a-c-0658-mecha_1-presentacion_2015.mp4”. Este documento MP4 coincide con el primer tramo de 10 minutos que podrás encontrar en el siguiente enlace de “UPV [Media]”: 2015-24 - Simulación Mecanismo a-c-0658 con Mechanica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-24 - Simulación Mecanismo a-c-0658 con Mechanica”. En la SEGUNDA FASE se procede a recopilar la información necesaria tomándola del modelo virtual creado en Solidworks 2007. Se muestra como parametrizar cada pieza, y como crear las imágenes necesarias que definen la posición inicial de cada una de ellas. El documento mp4 se denomina: “AdP_a-c-0658-mecha_2-parametrizacion_2015.mp4”. Se corresponde con los tramos de 10 minutos del 2 al 5 que podrás encontrar en el enlace previo. En la TERCERA FASE se muestras como obtener en Mathematica un modelo grafico del mecanismo en la posición inicial, utilizando la información generada en la fase previa. El documento mp4 se denomina: “AdP_a-c-0658-mecha_3-modelo grafico sw_2015.mp4”. Se corresponde con los tramos de 10 minutos del 6 al 11 que podrás encontrar en el enlace previo. En la ULTIMA FASE se crea el modelo cinemático en “Mechanica”, definiendo las piezas por puntos, defiendo los pares cinematicos utilizando las restricciones disponibles en esa aplicación, y se utiliza el modelo creado para comprobar la trayectoria del punto del acoplador, comparándola con la obtenida en Cosmos Motion 2007, que ha tenido que ser preparada para poderla leerla con Mathematica. El documento mp4 se denomina: “AdP_a-c-0658-mecha_4-modelo mechanica_2015.mp4”. Se corresponde con los tramos de 10 minutos del 12 al 16 que podrás encontrar en el enlace previo. Voluntariamente se pueden entregar los otros dos modelos seleccionados, para cada uno de los cuales se dispone de un solo mp4 con audio que muestra como realizarlo. Se trata del mecanismo “AdP_a-c-0683”, tipo I de Grashof, cuyo documento mp4 se denomina ” AdP_a-c-0683_mecha-completo_2015.mp4”. Este documento MP4 también se pueden encontrar en tramos de 10 minutos en el siguiente enlace de “UPV [Media]”: 2015-25 - Simulación Mecanismo a-c-0683 con Mechanica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-25 - Simulación Mecanismo a-c-0683 con Mechanica”. Y del mecanismo “AdP_a-c-0654”, también tipo I de Grashof pero con la particularidad que el lado mas corto del cuadrilátero es el “acoplador”, cuyo documento mp4 se denomina ” AdP_a-c-0654-mecha_completo_2015.mp4”. Este documento MP4 también se pueden encontrar en tramos de 10 minutos en el siguiente enlace de “UPV [Media]”: 2015-25 - Simulación Mecanismo a-c-0683 con Mechanica. Que se corresponde con uno de mis canales en esa plataforma denominado: “2015-25 - Simulación Mecanismo a-c-0683 con Mechanica”. El modelo obligatorio y cada uno de los que voluntariamente se realicen habrá que subirlos al servidor a la cuenta de entrega, colocando cada uno de ellos en su carpeta correspondiente.
GUIAS KINDLE DE ACTiVIDADES "ON-LINE" ASINCRONAS
La información detallada de la actividad, los enlaces necesarios para poder realizarla, y toda la información complementaria elaborada la puedes encontrar en las siguientes Guías Kindle:
Tecnología Máquinas (TM)
Simulación - CAs

Four-Bar - Simulation
Modelos AdP - Volumen II