TM-P6b - m3-a4b
Clases Prev Mm >> > 8a - Clase
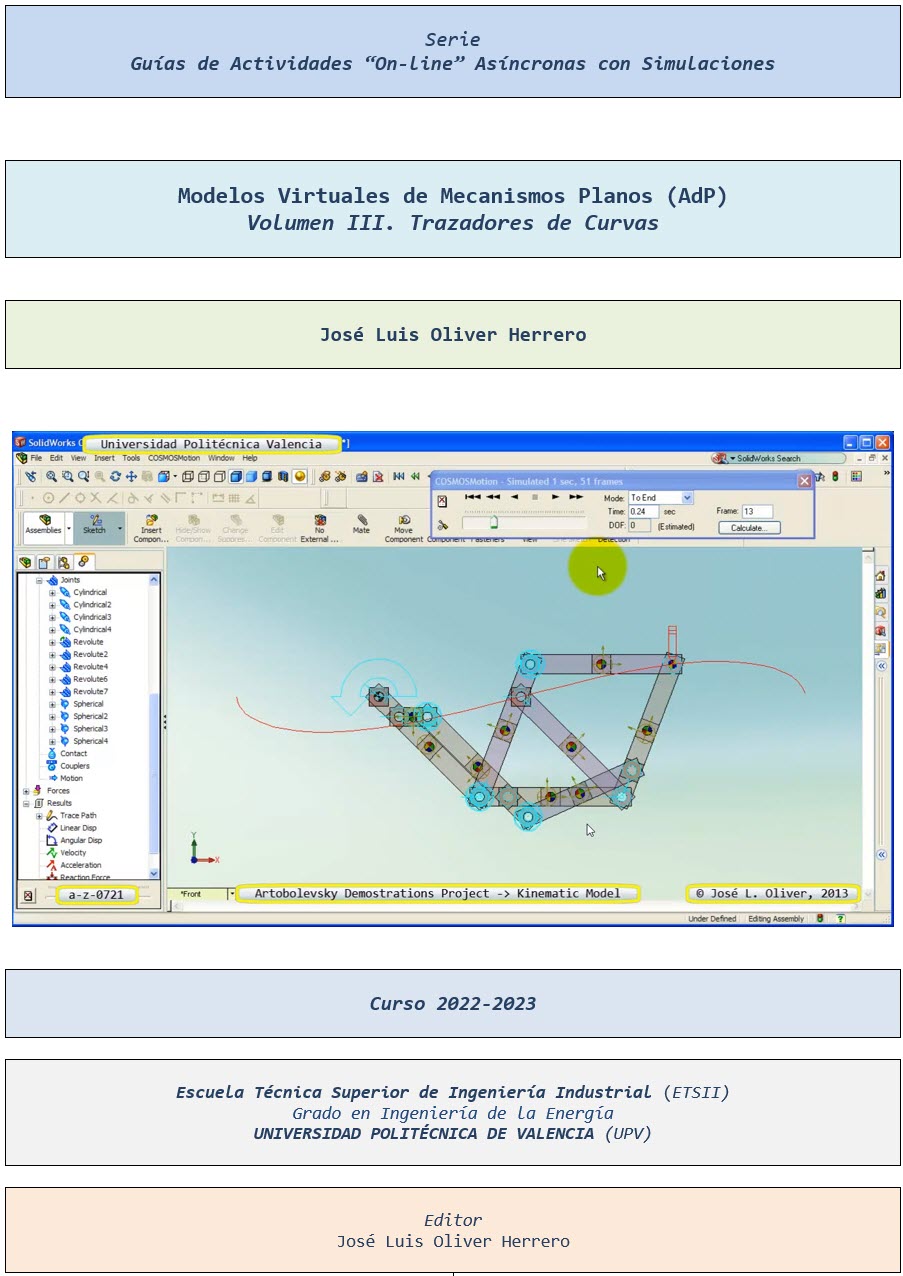
Esta actividad es la segunda de las “no guiadas”. La tendrás que realizar con el mismo mecanismo de Artobolevsky del tipo “trazador con deslizaderas” que se te asignó en la previa. Lo volverás a encontrar en la cuenta de entrega. Forma parte de las tres actividades que constituyen el PROYECTO 6 de los incluidos en el apartado “evaluación” de la “guía docente”. La primera de ellas, la m2-a4b, suponía el 20% de este proyecto. Esta segunda supone el 30%. La tercera, la m4-a4b, supondrá el 50% del Proyecto 6. La actividad consiste en crear el modelo cinemático virtual (mcv) en Cosmos Motion 2007 del mecanismo trazador que se te ha asignado, partiendo del modelo virtual creado en la actividad m2-a4b.
El modelo cinemático en Cosmos hay que denominarlo añadiendo el sufijo “-motion”. Hay que realizar una simulación cinemática para la forma de montaje que se muestra en la imagen de Artobolevsky, tomando como impulsor el cuerpo que se indica en esa descripción, realizándola entre unas posiciones tales que en la simulación se pueda apreciar la curva trazada por el punto correspondiente, tal y como se ve en la imagen citada. Hay que obtener un captura de los resultados de la simulación, denominándola adecuadamente y utilizando el formato JPEG, tal y como se pudo ver en los mp4 facilitados en la actividad “guiada” correspondiente. El documento “-motion” creado ha de contener los resultados de la simulación, de tal forma que cuando la revise directamente pueda comprobar el movimiento definido y observar el trazado de la curva. Una vez terminada se ha de subir al servidor utilizando la cuenta de entrega, copiando todos los documentos directamente en ella, sin crear ninguna carpeta adicional. Es necesario subir todos los documentos creados e esta actividad, y los que sirvieron de base para realizarla. Así como el que detallo a continuacion. Dado que el objetivo de esta actividad es realizar en Cosmos la selección de los pares cinematicos de tal forma que el mecanismo este “auto-alineado”, deberá tenerse en cuenta el procedimiento explicado en los mp4 de los modelos que había que realizar en la actividad “guiada” previa a esta, así como el desarrollo que en base a uno de los mecanismos voluntarios fue realizado en la pizarra en clase, consistente en localizar los “lazos cinemáticos” existentes, uno y uno, y proceder a “auto-alinearlos”, redefiniendo los tipos de pares de tal forma que fuesen coincidentes la movilidad aparente y la calculada utilizando la Formula de Movilidad de Groubler para mecanismo espaciales. Por lo que tras realizar este proceso, y comprobar su validez realizando la simulación en Cosmos, deberá completarse el diagrama cinemático del mecanismo, redefiniendo los pares elegidos y comprobando la movilidad con la fórmula para mecanismos espaciales, escanearlo o fotografiarlo, subiéndolo al servidor utilizando el mismo nombre que el modelo, añadiendo el sufijo “-dc-aa”, definiéndolo como documento JPEG.
Tecnología Máquinas (TM) III

Modelos AdP - Volumen III
EbL-701 - Symbolic S

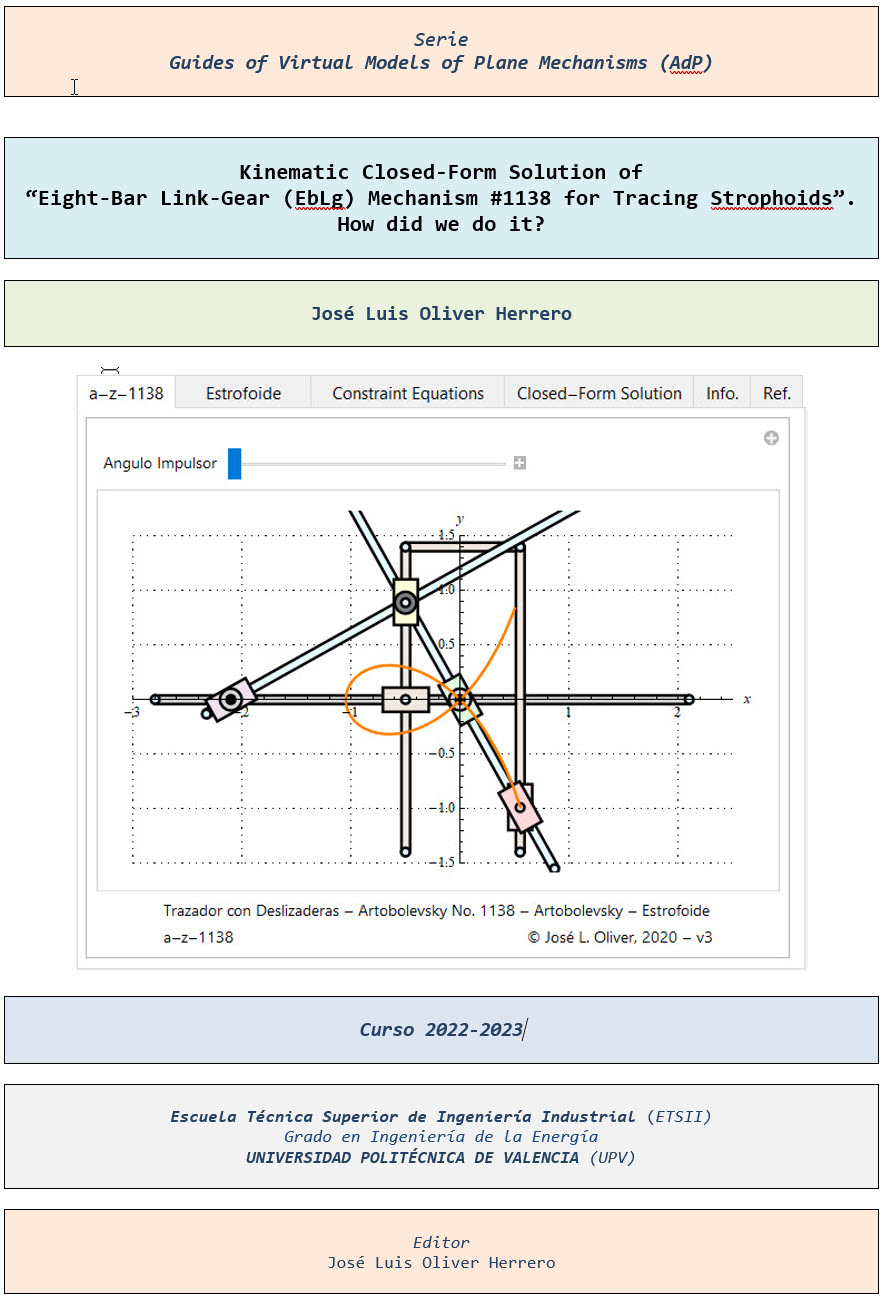
EbLg-1138 -Symbolic S
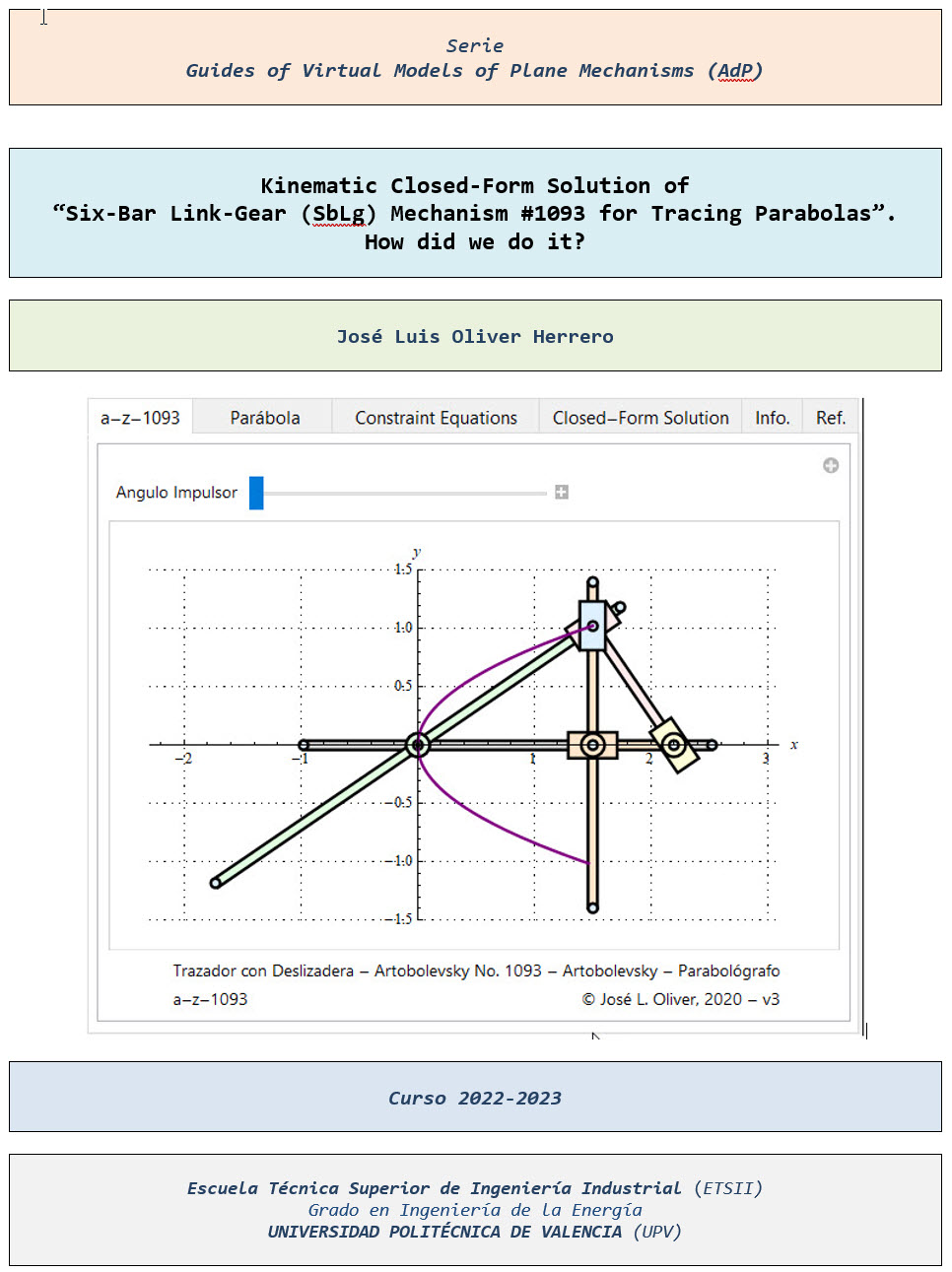
SbLg-1093 - Symbolic S
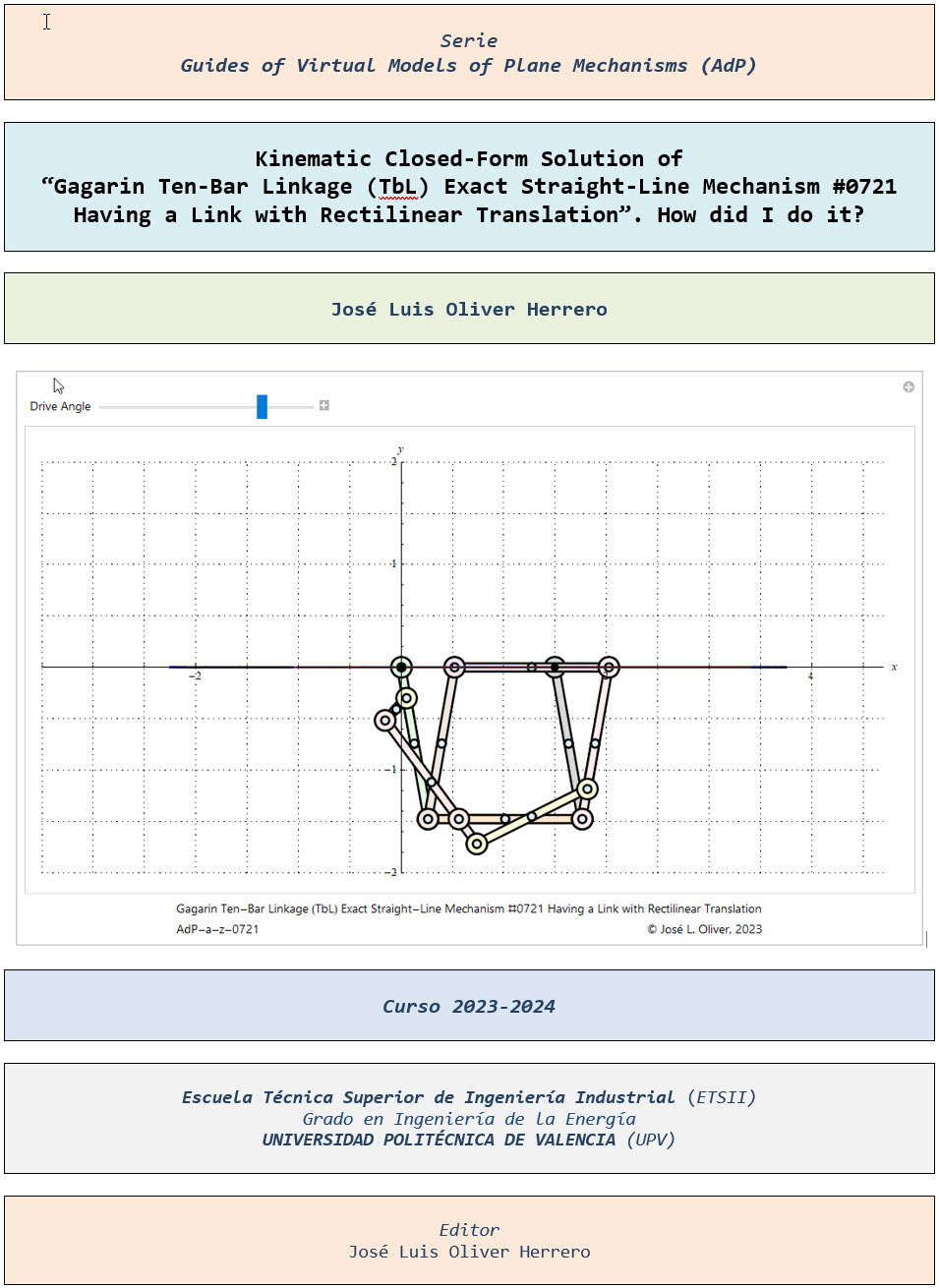
TbL-721 - Symbolic S